マイクロライントレースロボット競技(2010)
下記に示す競技規定を文書としてダウンロードできます.次のリンクを右クリックして保存してください.

この競技規定は、財団法人ニューテクノロジー振興財団マイクロマウス委員会によって制定された「ロボトレース競技規定」に準拠している。ただし、寸法や決勝トーナメントの運営方法等に関しては、大幅な規定の変更を行っている。

1.マイクロライントレースロボット競技とは
マイクロライントレースロボット競技とは、マイクロロボットに定められた周回コースを走行させて、1周の周回走行時間(ラップタイム)を競う競技である。この競技に出場するマイクロロボットをマイクロライントレーサ(図1)と呼ぶ。
図1
マイクロライントレーサ
2.マイクロライントレーサの機体に関する規定
2-1 マイクロライントレーサは自律型でなければならない。スタート・ゴールの操作を除き、有線、無線を問わず外部からの一切の操作を行ってはならない。
2-2 マイクロライントレーサは、競技中に操作者により、ハードウェアおよびソフトウェアの追加、取り外し、交換、変更を受けてはならない。ただし、軽微な修理・調整は許される。
2-3 マイクロライントレーサの大きさは1インチ角つまり、全長25.4mm、全幅25.4mm、全高25.4mm以内(図2)でなければならない。ただし、競技規定2-4で定めるセンサ部に関してはこの限りでない。
2-4 マイクロライントレーサのセンサ部は、センサ本体およびその支持構造物のみとし、その他の機能を付加してはならない。大きさや重量の制限は特に設けないが、マイクロライントレーサ本体に比べて著しく逸脱のある場合は、この限りでない。また、センサ部に許される回路構成は、
図2
マイクロライントレーサの大きさ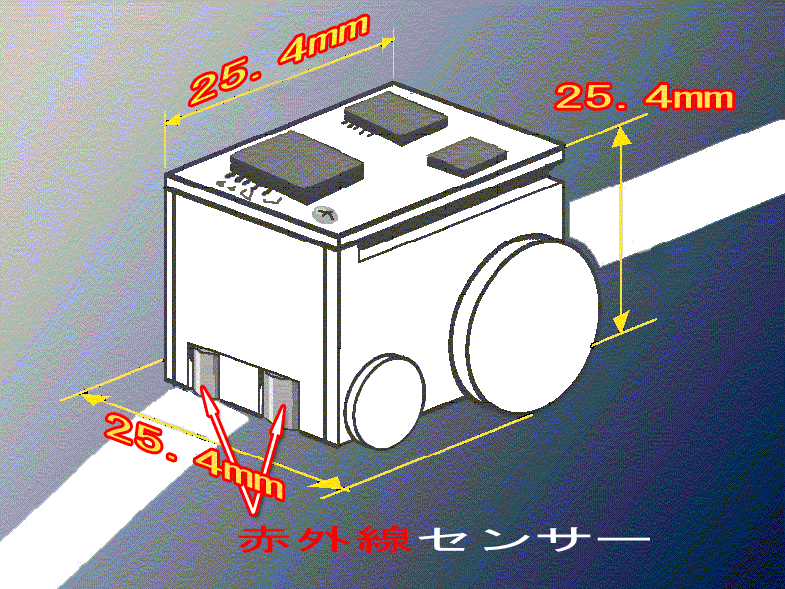
2) センサ本体制御のための制御線
3) センサからのセンシング情報を伝達するための信号線
以外は認めない。
3.コースに関する規定
3-1 コースはMCマット合成紙(セイコーエプソン株式会社製MCSP24R10N)を使用し、走行面は黒色、コースは幅5mmの白色のラインで示される。大会には大型のインクジェットプリンタを用いて上記黒色走行面および白線コースを印刷したA2版以上のMCマット合成紙を使用する。
3-2 コースは直線と円弧の組み合わせにより構成された連続した周回コースであり、円弧の曲率半径は20mm以上とする。
3-3 コースの長さは、1周5m以下とする。ただし、コースは交差することはない。
3-4 スタートラインおよびゴールラインは周回コース直線部分に存在し、ゴールラインはスタートラインの後方100mmとする。コースの進行方向右側のスタートラインおよびゴールライン上にはスタートマーカーおよびゴールマーカーが白色で示されている。スタートラインおよびゴールライン上にはスタートゲートおよびゴールゲートが置かれている。各ゲートの内のりは幅50mm、高さ50mmとする。ゲート間をスタート・ゴールエリアと呼ぶ。(図3、4、5参照)
3-5 スタートライン、ゴールラインの前後25mmは、直線コースとする。
3-6 コースの曲率が変化する地点には、進行方向左側の定められた位置(図6参照)にコーナーマーカーが白色で示されている。
3-7 コースの走行面は水平とする。
3-8 スタート・ゴールエリアには自動計時装置が置かれる。自動計時装置は赤外線センサを2個搭載しており、スタートライン上に1個、ゴールライン上に1個が配置されている。自動計時装置の寸法や設置位置、赤外線センサの設置位置などに関する詳細を図7に示す。なお、赤外線センサの設置高さは10mmである。

図3 コースの概要およびスタートマーカー、ゴールマーカーの形状
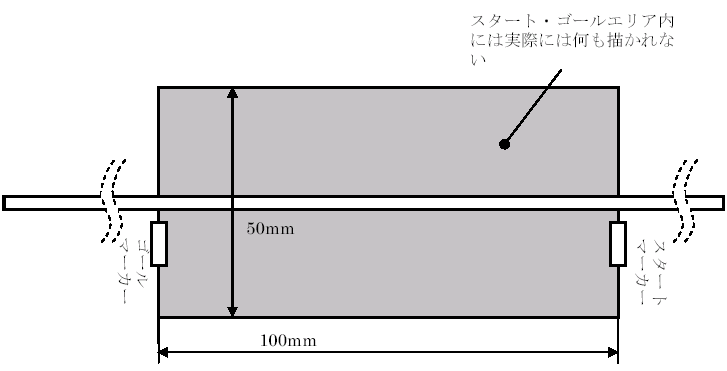
図4 スタート・ゴールエリアの形状
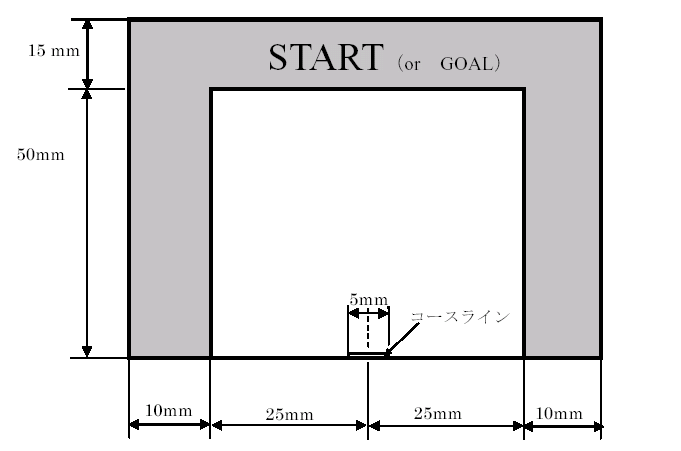
図5 スタートゲートおよびゴールゲートの形状
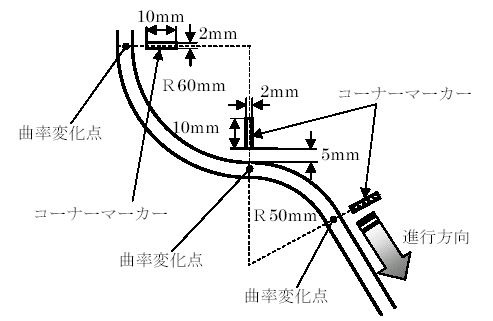
図6 コース円弧部分、コーナーマーカーの形状
図7 自動計時装置
2009.9-1K
4.競技に関する規定
4-1 予選においては、マイクロライントレーサがコースを1周するのに要した最短の時間をそのマイクロライントレーサの周回走行時間として記録する。
4-2 マイクロライントレーサの操作者は1名のみとする。ただし、競技中に軽微な修理・調整が必要となった場合には、コース脇で操作者以外の者からサポートを受けることができる。
4-3 コースが公開された後でコースに関する情報をマイクロライントレーサに入力してはならない。また競技中にスイッチ操作等で、コースに関する情報を修正、あるいは部分的に消去することはできない。
4-4 周回走行時間の測定は、スタートゲートに取り付けられた赤外線センサに反応があった時点から計時を始め、ゴールゲートに取り付けられた赤外線センサに反応があった時点で計時を終える。
4-5 操作者はスタート・ゴールエリア内であれば、マイクロライントレーサをどこからスタートさせてもよいが、マイクロライントレーサの一部がスタート・ゴールエリア内から出ていてはいけない。また、操作者はスタートの合図があるまで、マイクロライントレーサのスタート操作を行ってはいけない。マイクロライントレーサは周回走行後、スタート・ゴールエリア内に自動または手動で停止させなければならない。
<補足1>
操作者が審判のスタート合図がないままマイクロライントレーサのスタート操作を行った場合:
操作者はスタート準備が完了次第、審判に合図を送り(手を上げる、声をかけるなど)、審判のスタート合図を待ってからスタート操作を行うこと。スタート合図を待たずスタートさせた場合、審判は直ちに走行中止を宣言し、マイクロライントレーサの再スタートを命じる。この走行は1回の周回走行とみなされ、記録はコースアウトと同様に「走行中止」となる。
<補足2>
マイクロライントレーサが周回走行後、スタート・ゴールエリア内で自動停止せず、または操作者も停止させないで、そのまま走行を続けた場合:
スタートライン上に設置された赤外線センサに反応があると周回走行時間がリセットされる。したがって、ゴールライン通過後に停止することなく次の周回走行に入る場合、前の周回走行時間が消去される恐れがあるが、この場合は記録なしとする。
4-6 操作者には3分間の持ち時間が与えられ、この間5周までの走行をさせることができる。審判が競技開始を宣言した時点から持ち時間の計時を始め、競技開始の宣言後にマイクロライントレーサの調整を行っている間も計時を続行する。
<補足>
持ち時間3分間の計時を開始するタイミングなど:
審判が操作者を呼び出し、競技開始を宣言したときに計時が開始される。コンテストの円滑運営のため、センサの感度調整などの時間は競技時間に含む。また、マイクロライントレーサの自立性を高める意図や事前にコースを非公開としている関係もあり、コースの状況確認を行うための時間は与えられない。
4-7 走行は毎回コース上に定められたスタート・ゴールエリア内より指定された方向に対して開始するものとする。
4-8 マイクロライントレーサが周回走行中にコースアウトした場合、もしくは2秒以上停止した場合、その周回走行が終了したものとする。
4-9 操作者は審判の指示、または走行中止の許可がない限りスタート・ゴールエリア以外を走行中のマイクロライントレーサに触れてはならない。審判は、マイクロライントレーサが走行不能となった場合、走行中止の申し出を認める。
<補足>
マイクロライントレーサの走行中止:
競技規定4-8に示すように、マイクロライントレーサが周回走行中に2秒以上停止した場合、審判は走行不能と判断し、走行中止を宣言する。さらに、マイクロライントレーサが明らかに操作者が意図しない動作(その場で回転を始める、前進後退を小刻みに繰り返しほとんど進まない等)を行った場合、操作者の申し出で審判は走行中止の申し出を受け、走行中止を宣言する。この走行は1回の周回走行と数え、記録はコースアウトと同様「走行中止」となる。
4-10 走行中のマイクロライントレーサ本体もしくはセンサ部がライン上から完全に離れた場合コースアウトとみなす。
4-11 競技場の照明、温度、湿度は通常の室内環境とする。照明の調整に関する申し出は受け付けられない。
4-12 競技委員長は必要と認めた場合、操作者に対してマイクロライントレーサについての説明を求めることができる。また、競技委員長の判断で走行の中止、または失格の宣言その他必要な措置を講ずることができる。
4-13 決勝トーナメントの運営方法等に関しては、別途定める。
[注意]
1.競技中にプログラムのローディングおよびROMの交換を行ってはならない。また、競技中にマイクロライントレーサを、本体とは独立した開発装置やコンソールボックスと接続して、プログラムの実行に関する指示を与えることも禁止する。
2.スタート操作の後、スタートラインに達せず停止した場合もしくはコースアウトした場合は、1回の走行とみなす。
3.コースは、曲率の変化する円弧が連続する場合もある。(図6参照)
4.走行面のグリップなど競技コースについての申し出は受け付けない。
5.周回走行時間の計測に何らかの異常が認められた場合、審判の判断によりその周回の計時データを無効とし、走行のやり直しを指示する。ただし、<4-5 補足2>に該当しない場合に限る。
 トップへ
トップへ